Seawolf U-2 (Robbe. Conversion to a static diver.)
 Length: 90cm
Length: 90cm- Weight: 4,5 kg
- Scale: Not a scale model.
- Type: Static diver – Pump with bladder.

This is a second version of the model – a rebuild. From the earlier version I have only used some of the parts like the outer hull and the tower.
Built:
In this article there will be lots of references to the earlier version of this model, cause of that I recommend reading about SEAWOLF V1 first.
The inner structure of the WTC, with all the mechanisms has been redesigned and replaced. The model was designed by Robbe as a dynamic diver and in it’s earlier version I was assembling it according to the manual at first, then after completing the build I did a conversion into a static diver. This time, as I already had a bit of experience, I was constructing this thing as a static diver from the very beginning. I also decided about correcting some of the Robbe dumb ideas – like the WTC locking mechanism, based on a thin, rubbish M2 screw.
Below you can see the old WTC from Seawolf U1 (the dirty one) and the new one, cut by me, additionally reinforced with brass strips/flat bars.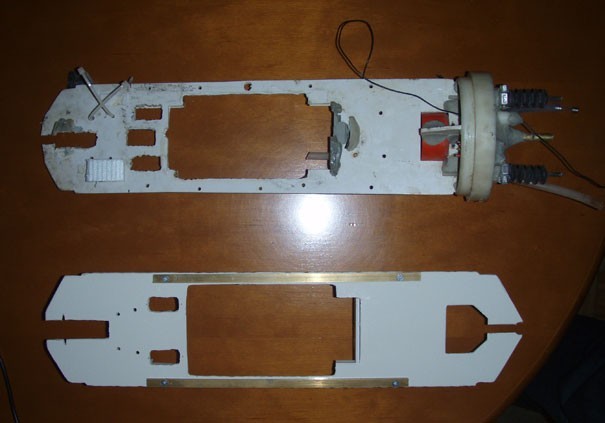
The diving principle was the same as in the earlier version of the model – pump with a bladder. I’ve manufactured the system from scratch, using better equipment. It was now more robust, safer and much more efficient. Controlled by a single RC channel (the version in V1 required two channels). The diving tank became much bigger now too and during surface runs the deck is more visible, which looks way better. The ballast tank has it’s place in the center of the WTC, which makes the underwater runs much more smoother. Also, the diving tank valve is now automatic – it opens when you turn the pump on and immediately shuts as soon you turn the pump off.
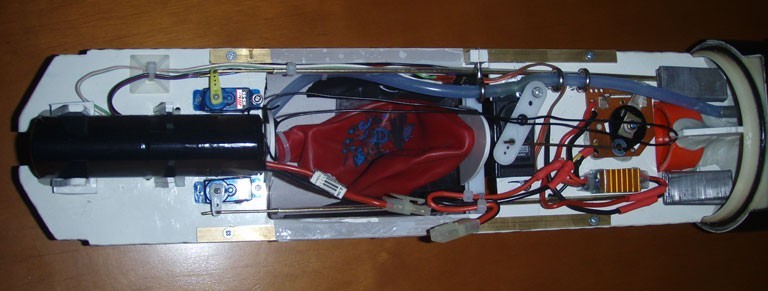
The water inlet for the diving system has been placed vertically – slightly above the level of the pump – which allows for it’s easy flooding and automatic removal of the air trapped in the system. It’s worth to remember that geared pumps are quite weak when it comes to “sucking” liquids, but they do have quite a punch when it comes to building up pressure.

The Seawolf V1 had to be assembled from 3 separate parts before each run and you I had to be absolutely sure that all the parts have been connected hermetically. It was a hard and rather annoying process, especially when done on meadow near the pond, as a single grass stalk caught between the gaskets could cause a leak. So the Seawolf U-2 was designed as two part boat only. The sealing method has been changed and it’s now more forgiving if something gets caught into it. In the end, you now need much less time on the shore to get the model ready for a run.
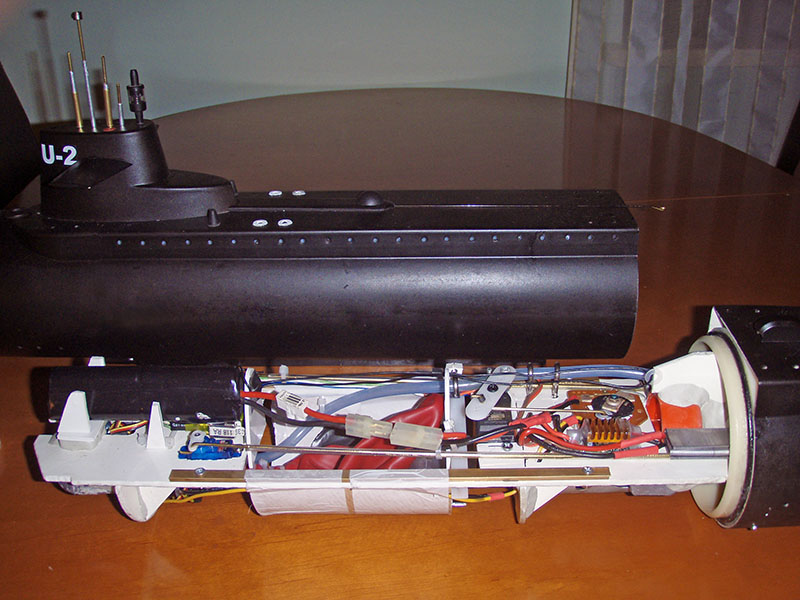

The bow dive planes have been removed and their mounting places cut off. The holes which left after that have been filled with resin and sanded down to give a nice smooth surface. The same fate happened to the earlier holes left by the screws. The diving planes have been placed on the tower/sail (like in the Los Angeles class submarines) and they’re being operated by the same servo as the aft planes.

The power source and the motor have been replaced too. The 6V lead acid battery has been replaced with a 7.2V Ni-MH 2500 mah battery pack (and by a Li – Ion 7,2 V 4400 mAh a bit later). The Model was designed as a dynamic diver, but now – while having a ballast system, there was no more need for the powerful and “power hungry” motor from the KIT. I’ve replaced the old one with a 480 class motor, but designed for 12V operation to lower the rpm even more. The model now behaves much better and runs almost twice longer!




Like I said earlier, the model behaves differently now, but in my opinion – better. The dive plains placed on the sail will not help with the dive, but the Seawolf is much more stable during the underwater cruise.

